
Resumo — Como aplicativos de navegação, como o Apple Maps ou Google Maps, calculam a rota mais rápida e o tempo exato de chegada (ETA)? A resposta é pura teoria dos grafos. A rede de ruas de uma cidade é modelada como um grafo ponderado gigante, onde interseções são nós e as ruas são arestas. O “melhor” caminho não é fixo; ele muda a cada minuto com o trânsito. Este post explora os algoritmos clássicos de caminho mínimo (como Dijkstra e A*) que potencializam a navegação inteligente em tempo real.
1. O Mapa Como um Grafo Ponderado e Dinâmico
A base de qualquer sistema de navegação é o mapa. Em Teoria dos Grafos, a malha de ruas de uma cidade é um grafo:
- Nós: São as interseções, cruzamentos ou pontos onde você pode entrar/sair de uma via (pontos de decisão).
- Arestas: São os segmentos de rua que conectam esses nós. Elas são direcionadas (refletindo ruas de mão única) ou bidirecionais.
O ponto crucial, como vimos no nosso post sobre a Uber, é que este grafo é ponderado. Cada aresta (trecho de rua) tem um “custo” associado. Esse custo não é apenas a distância física, mas sim o tempo estimado de travessia. E este peso é dinâmico: ele muda constantemente com base em:
- Condições de tráfego (dados de outros usuários, sensores);
- Horários (horário de pico vs. madrugada);
- Eventos locais (jogos, shows, obras);
- Condições climáticas (chuva, neve).
2. O Desafio: Encontrar o Caminho de Custo Mínimo
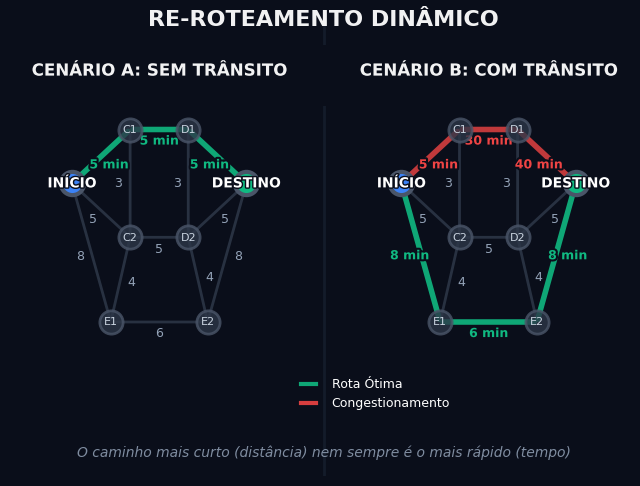
O problema fundamental de “qual é o melhor caminho daqui até lá?” se traduz diretamente em encontrar o caminho de custo mínimo (shortest path) neste grafo ponderado e dinâmico. (Note que “shortest” aqui se refere ao menor custo total, que no caso é tempo, não necessariamente a menor distância).
Para resolver isso, os sistemas de navegação usam algoritmos clássicos:
A. Algoritmo de Dijkstra:
O algoritmo fundamental para este problema. O Dijkstra explora o grafo “para fora” a partir do seu ponto de partida, nó por nó, calculando o caminho mais barato para chegar a cada interseção, garantindo que, ao final, ele encontre o caminho de menor custo absoluto para o seu destino.
B. Algoritmo A* (A-Estrela):
Dijkstra é robusto, mas “cego”: ele explora em todas as direções. O A* (
C. Hierarquias e Atalhos:
Em um grafo de escala continental (milhões de nós), até o A* pode ser lento. Sistemas modernos usam técnicas de pré-processamento, como Contraction Hierarchies, que criam “atalhos” na rede (ex: “para ir de São Paulo ao Rio, a rota provavelmente passará pela Via Dutra”). Isso permite que o algoritmo descarte rotas locais irrelevantes e encontre caminhos de longa distância quase instantaneamente.
3. Re-roteamento: O Grafo que Muda Sob Seus Pés
O verdadeiro desafio não é calcular a rota uma vez, mas mantê-la ótima. O trabalho do sistema de navegação é contínuo:
- Monitoramento de Pesos: O sistema recebe dados de tráfego em tempo real (muitas vezes de forma anônima dos próprios usuários do app) e atualiza os pesos (custos de tempo) das arestas do grafo.
- Recálculo: O algoritmo reavalia: “Dado o trânsito agora, a rota que eu sugeri ainda é a mais rápida?”.
- Re-roteamento: Se uma rota alternativa (um caminho diferente no grafo) se tornar significativamente mais rápida porque os pesos mudaram (ex: um acidente na sua rota atual), o sistema sugere o “re-route”.
O “re-roteamento” nada mais é do que o algoritmo de caminho mínimo rodando novamente em um grafo que acabou de ser atualizado.
4. Desafios de Engenharia e Métricas de Sucesso
Operar este sistema em escala global apresenta desafios imensos:
- Escala: O grafo de ruas global é massivo. Os algoritmos precisam ser otimizados ao extremo para dar respostas em milissegundos.
- Dados Ruidosos: Os dados de tráfego vindos dos usuários podem ser “ruidosos”. O sistema precisa ser inteligente para filtrar outliers (ex: um usuário que parou para abastecer não significa que a via está parada).
- Restrições Complexas: O grafo precisa modelar regras do mundo real: restrições de conversão (ex: não virar à esquerda das 7h às 9h), pedágios, zonas de restrição (ex: ZTL na Europa), mudanças de sentido temporárias.
O sucesso de um sistema como este é medido pela sua precisão:
- Erro de ETA: A diferença absoluta entre o tempo estimado na partida e o tempo real de chegada.
- Qualidade da Rota: O usuário sentiu que a rota foi inteligente? O sistema evitou trânsitos óbvios?
- Taxa de Re-roteamento: O sistema sugere re-rotas úteis sem “perturbar” o motorista desnecessariamente?
Conclusão
Sistemas de navegação como o Apple Maps são, talvez, a aplicação mais pura e difundida da Teoria dos Grafos no nosso dia a dia. Eles são a prova viva de que algoritmos desenhados há décadas (como Dijkstra e A*) são a fundação de tecnologias incrivelmente modernas. O desafio não está apenas em ter o grafo, mas em mantê-lo vivo, atualizando seus pesos em tempo real para refletir o mundo caótico e dinâmico lá fora.
Referências
- Cormen, T. H. et al. (2011). Introduction to Algorithms (3rd ed.). MIT Press. (O livro-texto clássico que cobre algoritmos de caminho mínimo).1
- Dijkstra, E. W. (1959). A note on two problems in connexion with graphs. Numerische mathematik, 1(1), 269-271.2
- Hart, P. E., Nilsson, N. J., & Raphael, B. (1968). A fo3rmal basis for the heuristic determination of minimum cost paths. IEEE transactions on Systems Science and Cybernetics, 4(2), 100-107. (O paper original do A*).
- Geisberger, R. et al. (2008). Contraction Hierarchies: Faster and Simpler Hierarchical Routing in Road Networks. WEA 2008. (Uma das técnicas de otimização de rota em larga escala).
Sobre o autor
Rener Menezes
Cofundador & CTO — FitBank
Rener Menezes é cofundador e CTO do FitBank, fintech brasileira de Banking-as-a-Service. Com mais de 25 anos de experiência projetando sistemas financeiros em larga escala, é bacharel em Sistemas de Informação e mestrando na Unifor, onde pesquisa Redes Neurais de Grafos e aprendizado por reforço para detecção de fraude. Interesses: sistemas distribuídos, infraestrutura de pagamentos e graph ML.
Links: LinkedIn · ORCID · contato@grafolab.ia.br
Deixe uma resposta